

































































































































![[The AI Show Episode 144]: ChatGPT’s New Memory, Shopify CEO’s Leaked “AI First” Memo, Google Cloud Next Releases, o3 and o4-mini Coming Soon & Llama 4’s Rocky Launch](https://www.marketingaiinstitute.com/hubfs/ep%20144%20cover.png)




























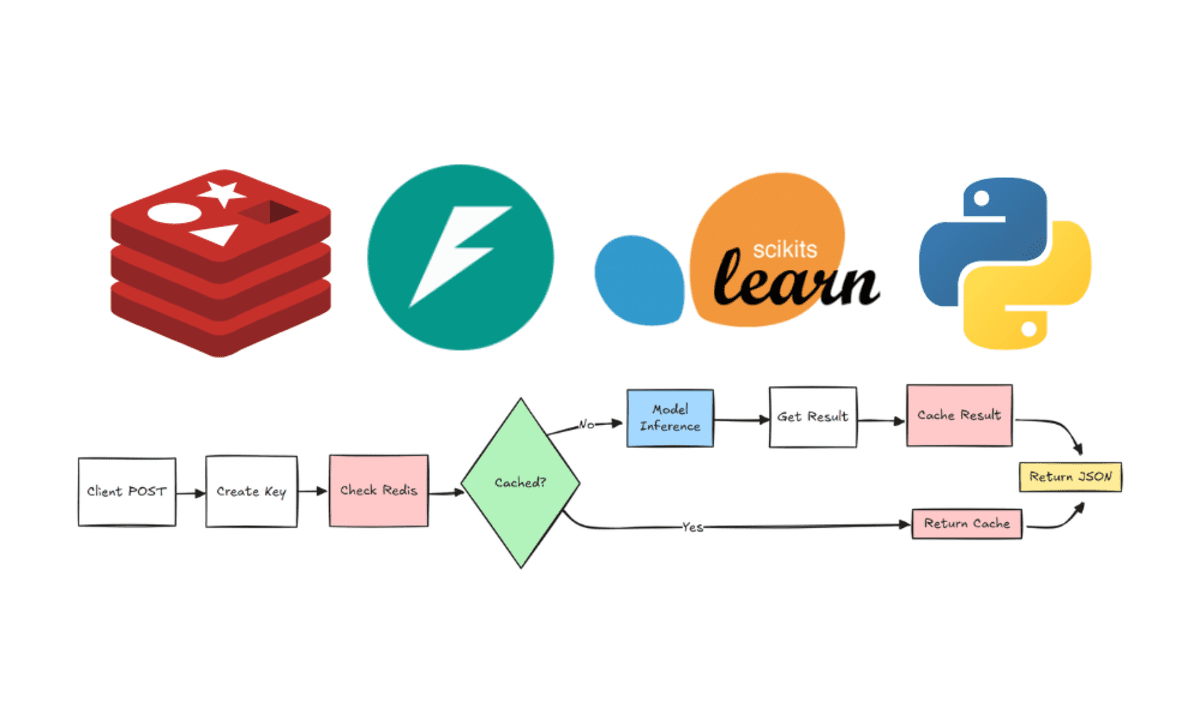
































































































![API design for precomputation cache [closed]](https://cdn.sstatic.net/Sites/softwareengineering/Img/apple-touch-icon@2.png?v=1ef7363febba)








































































































_Olekcii_Mach_Alamy.jpg?width=1280&auto=webp&quality=80&disable=upscale#)









































































































![Dummy Models Showcase 'Unbelievably' Thin iPhone 17 Air Design [Images]](https://www.iclarified.com/images/news/97114/97114/97114-640.jpg)

![M4 MacBook Air Drops to New All-Time Low of $912 [Deal]](https://www.iclarified.com/images/news/97108/97108/97108-640.jpg)












































































































Path conflict detection in C++ using a trie-based algorithm
Introduction I am currently working on a tool that copies or moves specific directories on the file system. These directories are defined in a JSON file, which contains a list of source and destination paths to be processed in order. However, when more than one path is configured, a possible problem can occur: two paths might overlap. For example, if /a/b and /a/b/c are both listed as sources, it is unclear what should happen if one is moved before the other. This can lead to inconsistent behavior or even data loss, especially when moving files. To detect such conflicts reliably, I wrote a function that stores all paths in a simple tree structure and checks whether a new path overlaps with an existing one. In this article, I show how this function works and why it has proven useful in practice. The Trie Structure To efficiently check for overlapping paths, they are stored in a tree structure – more precisely, in a trie. Each node in the trie represents a single directory name, that is, one path component. This allows each path to be built step by step by inserting its components one after another into the tree. The structure of a node is kept simple: struct path_node { std::unordered_map children{}; bool is_terminal{false}; }; children contains all child nodes – that is, the subdirectories of the current node. is_terminal marks whether a complete path ends at this point. When a new path is inserted, all components are traversed – for example a, b, c – and the trie is updated accordingly: if a child node already exists, it is followed; otherwise, a new node is created. The code for that looks like this: auto [child, _] = current_node->children.try_emplace(/* path component */); current_node = &child->second; try_emplace inserts the new node only if it does not already exist – otherwise, it simply returns the existing one. In both cases, current_node then points to the correct child node. This way, the path is built step by step inside the trie. With this structure in place, it is now possible to reliably detect whether a new path is part of an existing path, contains an existing path, or is identical to one. How paths are traversed Before we get to the examples, I want to briefly explain how std::filesystem::path behaves – especially how a path is split into individual components. When a path like /a/b is traversed in a loop for (auto const& directory : path) { ... } the iterator yields each path component separately – in this case: / (root) a b This is important because the conflict check is based exactly on this structure: each of these components is handled and stored separately in the trie. This is the only way to reliably detect whether a path already exists or overlaps with another one. Conflict Detection Examples The following section shows how conflict detection works in detail using concrete path examples. Each case represents a typical situation that can occur in a configuration. Step by step, these examples build up the logic behind the has_conflict function – starting from simple cases and gradually covering all necessary checks. Example 1: A simple path (/a/b) The path /a/b is the first one to be inserted – the trie is still empty. The nodes a and then b are created step by step, and b is marked as terminal at the end. No conflict can occur at this point. This case shows the base state: paths are added without interfering with anything. namespace fs = std::filesystem; auto has_conflict(path_node& root_node, fs::path const& path) -> bool { path_node* current_node = &root_node; for (auto const& directory : path) { auto [child, _] = current_node->children.try_emplace(directory.string()); current_node = &child->second; } current_node->is_terminal = true; return false; } Example 2: A longer path below an existing one (/a/b/c) In this case, the path /a/b is already stored in the trie and marked as terminal. When trying to insert /a/b/c, the function detects at node b that a complete path already ends here. This means the new path lies underneath an existing one – a clear conflict. namespace fs = std::filesystem; auto has_conflict(path_node& root_node, fs::path const& path) -> bool { path_node* current_node = &root_node; for (auto const& directory : path) { if (current_node->is_terminal) { return true; } auto [child, _] = current_node->children.try_emplace(directory.string()); current_node = &child->second; } current_node->is_terminal = true; return false; } Example 3: The same path again (/a/b) If the same path is inserted again, the function recognizes at the end that b is already marked as a terminal path. This is also treated as a conflict – duplicate entries must be prevented. namespace fs = std::filesystem; auto has_conflict(path_node& root_node, fs::path const& path) -> bool { path_node* cur
Introduction
I am currently working on a tool that copies or moves specific directories on the file system. These directories are defined in a JSON file, which contains a list of source and destination paths to be processed in order.
However, when more than one path is configured, a possible problem can occur: two paths might overlap. For example, if /a/b and /a/b/c are both listed as sources, it is unclear what should happen if one is moved before the other. This can lead to inconsistent behavior or even data loss, especially when moving files.
To detect such conflicts reliably, I wrote a function that stores all paths in a simple tree structure and checks whether a new path overlaps with an existing one. In this article, I show how this function works and why it has proven useful in practice.
The Trie Structure
To efficiently check for overlapping paths, they are stored in a tree structure – more precisely, in a trie. Each node in the trie represents a single directory name, that is, one path component. This allows each path to be built step by step by inserting its components one after another into the tree.
The structure of a node is kept simple:
struct path_node {
std::unordered_map<std::string, path_node> children{};
bool is_terminal{false};
};
-
childrencontains all child nodes – that is, the subdirectories of the current node. -
is_terminalmarks whether a complete path ends at this point.
When a new path is inserted, all components are traversed – for example a, b, c – and the trie is updated accordingly: if a child node already exists, it is followed; otherwise, a new node is created.
The code for that looks like this:
auto [child, _] = current_node->children.try_emplace(/* path component */);
current_node = &child->second;
try_emplace inserts the new node only if it does not already exist – otherwise, it simply returns the existing one. In both cases, current_node then points to the correct child node. This way, the path is built step by step inside the trie.
With this structure in place, it is now possible to reliably detect whether a new path is part of an existing path, contains an existing path, or is identical to one.
How paths are traversed
Before we get to the examples, I want to briefly explain how std::filesystem::path behaves – especially how a path is split into individual components.
When a path like /a/b is traversed in a loop
for (auto const& directory : path) { ... }
the iterator yields each path component separately – in this case:
/ (root)
a
b
This is important because the conflict check is based exactly on this structure: each of these components is handled and stored separately in the trie. This is the only way to reliably detect whether a path already exists or overlaps with another one.
Conflict Detection Examples
The following section shows how conflict detection works in detail using concrete path examples. Each case represents a typical situation that can occur in a configuration.
Step by step, these examples build up the logic behind the has_conflict function – starting from simple cases and gradually covering all necessary checks.
Example 1: A simple path (/a/b)
The path /a/b is the first one to be inserted – the trie is still empty. The nodes a and then b are created step by step, and b is marked as terminal at the end.
No conflict can occur at this point. This case shows the base state: paths are added without interfering with anything.
namespace fs = std::filesystem;
auto has_conflict(path_node& root_node, fs::path const& path) -> bool {
path_node* current_node = &root_node;
for (auto const& directory : path) {
auto [child, _] = current_node->children.try_emplace(directory.string());
current_node = &child->second;
}
current_node->is_terminal = true;
return false;
}
Example 2: A longer path below an existing one (/a/b/c)
In this case, the path /a/b is already stored in the trie and marked as terminal. When trying to insert /a/b/c, the function detects at node b that a complete path already ends here.
This means the new path lies underneath an existing one – a clear conflict.
namespace fs = std::filesystem;
auto has_conflict(path_node& root_node, fs::path const& path) -> bool {
path_node* current_node = &root_node;
for (auto const& directory : path) {
if (current_node->is_terminal) { return true; }
auto [child, _] = current_node->children.try_emplace(directory.string());
current_node = &child->second;
}
current_node->is_terminal = true;
return false;
}
Example 3: The same path again (/a/b)
If the same path is inserted again, the function recognizes at the end that b is already marked as a terminal path. This is also treated as a conflict – duplicate entries must be prevented.
namespace fs = std::filesystem;
auto has_conflict(path_node& root_node, fs::path const& path) -> bool {
path_node* current_node = &root_node;
for (auto const& directory : path) {
if (current_node->is_terminal) { return true; }
auto [child, _] = current_node->children.try_emplace(directory.string());
current_node = &child->second;
}
if (current_node->is_terminal) {
return true;
}
current_node->is_terminal = true;
return false;
}
Example 4: A shorter path (/a) after /a/b already exists
Here, the function tries to insert /a even though /a/b is already present. This also results in a conflict, because /a is a prefix of an existing path. The function detects this by checking whether node a already has child nodes.
namespace fs = std::filesystem;
namespace rng = std::ranges;
auto has_conflict(path_node& root_node, fs::path const& path) -> bool {
path_node* current_node = &root_node;
for (auto const& directory : path) {
if (current_node->is_terminal) { return true; }
auto [child, _] = current_node->children.try_emplace(directory.string());
current_node = &child->second;
}
if (current_node->is_terminal || !rng::empty(current_node->children)) {
return true;
}
current_node->is_terminal = true;
return false;
}
The final version
namespace fs = std::filesystem;
namespace rng = std::ranges;
auto has_conflict(path_node& root_node, fs::path const& path) -> bool {
path_node* current_node = &root_node;
for (auto const& directory : path.lexically_normal()) {
if (directory.empty()) { break; }
if (current_node->is_terminal) { return true; }
auto [child, _] = current_node->children.try_emplace(directory.string());
current_node = &child->second;
}
if (current_node->is_terminal || !rng::empty(current_node->children)) {
return true;
}
current_node->is_terminal = true;
return false;
}
This version includes all necessary checks to ensure consistent and conflict-free handling of paths. Two additional details make the function more robust in practice:
lexically_normal()
This version uses lexically_normal(). The reason: paths like a/./b/../b/c contain components such as . (current directory) and .. (parent directory), which are otherwise processed literally when iterated:
a
.
b
..
b
c
Without normalization, the path would not be recognized as what it actually is – namely a/b/c. The conflict check would become unreliable or incorrect.
lexically_normal() ensures that such paths are cleaned up before being processed.
directory.empty()
Another technical detail: paths like /a/b/ end with a slash. This would result in an empty component when iterated:
a
b
""
The line
if (directory.empty()) { break; }
prevents such empty components from being added to the trie. Without this check, paths like /a/b and /a/b/ would be treated as different, even though they refer to the same location.
Conclusion
The has_conflict function is not a complex algorithm, but it solves a concrete problem reliably. The trie structure allows each path to be represented in a structured, component-based way, which makes it easy to detect conflicts early.
In my use case, the function has proven to be solid and flexible. It works regardless of whether a path is longer, shorter, or identical to an existing one – and it can easily be adapted to other scenarios where path overlaps need to be avoided.
Project Note: The
has_conflictfunction is part ofdropclone– a C++ tool for automated directory synchronization.The project is still under development and available here: